8.3. СИСТЕМА ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ
Управление угловым положением КА требует не только достаточно полной информации о таковом и о скорости его изменения, но и возможности целенаправленных изменений углового движения КА. Нужные для этой цели управляющие моменты создаются системой исполнительных органов.
По принципу действия исполнительные органы можно разбить на два типа: использующие для создания управляющих моментов внешние по отношению к КА силы и основанные на реактивных принципах.
К первому типу относят такие исполнительные органы, которые создают управляющие моменты в результате взаимодействия КА с магнитным полем Земли, например, за счет расположения на КА токонесущих контуров или поворачиваемых постоянных магнитов так, чтобы изменялся магнитный момент КА и в результате целенаправленного взаимодействия с магнитным полем Земли создавались нужные управляющие моменты, приложенные к корпусу КА. Преимуществом подобных моментных магнитоприводов является то, что для их функционирования потребна лишь электроэнергия, в принципе восполняемая от солнечных батарей, а недостатком - существование одного направления, вокруг которого принципиально невозможно создание управляющего момента, т. е. направление, параллельное вектору магнитной индукции Земли в данной точке орбиты.
Ко второму типу исполнительных органов относят реактивные двигатели ориентации (ДО), создающие реактивные силы и гироскопические силовые стабилизаторы (ГСС), создающие реактивные моменты.
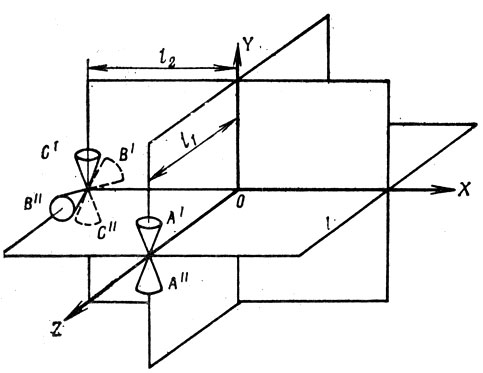
Рис. 8.1. Расположение двигателей ориентации относительно главных центральных осей инерции КА при управлении ориентацией с помощью сил
Для обеспечения полного управления ориентацией, т. е. управления по трем осям КА, необходимо, чтобы расположение осей КА и ДО было согласовано с эллипсоидом инерции КА (рис. 8.1), оси КА совпадали с главными центральными осями инерции КА, а включение одного ДО давало бы момент только вокруг одной из таких осей. Пусть триэдр жестко связанных с корпусом КА осей OXYZ совпадает с главными центральными осями инерции, а показанные на рис. 8.1 плоскости являются плоскостями симметрии эллипсоида инерции. Оси сопел ДО A, B, С лежат в плоскостях, проходящих через центр масс О и перпендикулярных осям инерции, относительно которых происходит управление; ДО удалены от соответствующей оси на расстояние l и, кроме того, перпендикулярны прямой, соединяющей точку их установки и ось, вращение вокруг которой они обеспечивают. Поэтому включение любого ДО создает момент только относительно одной главной оси инерции.
Преимуществом такой схемы является наличие минимального количества ДО (шесть), а недостатком - приложение к корпусу КА при включении одного ДО не только момента, но и силы, что малосущественно, но на длительных межпланетных трассах нежелательно. Чисто моментное управление можно обеспечить за счет удвоения количества, ДО, включаемых попарно. Как известно из механики, место приложения пары сил несущественно. Это положение предоставляет определенную свободу при компоновке КА. Схема такого расположения ДО показана на рис. 8.2, причем двигатели, обеспечивающие вращение вокруг одной главной центральной оси инерции, обозначены одинаковыми буквами.
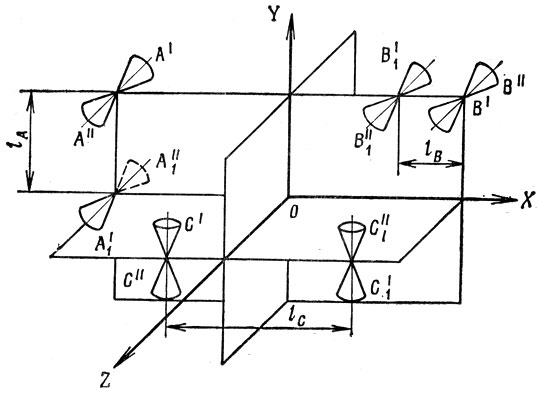
Рис. 8.2. Расположение двигателей ориентации относительно главных центральных осей инерции КА при управлении ориентацией парами сил
Иногда размещение ДО диктуется их расположением на одном агрегатном отсеке (рис. 8.3), когда все они сосредоточены в одной плоскости и управление вокруг осей ОК и OZ происходит за счет управления силами, а по оси ОХ - пар сил.
Техническое решение реактивных двигателей ориентации может быть различным. Чаще всего используют два типа таких ДО: работающие на сжатом газе и на одно- или двухкомпонентном топливе. В ДО, работающем на сжатом газе (рис. 8.4), в баллоне хранится сжатый до большого давления газ (обычно азот), давление которого в редукторе снижается до нужного значения. Через коллектор газ поступает к ДО (по сути это электропневмоклапаны с соплами Лаваля), которые открываются и закрываются по командам, поступающим из блоков логики. Для полного отключения системы служит запорный клапан.
В ДО, использующих двухкомпонентное топливо (рис. 8.5), газ (служащий теперь не рабочим телом, а средством подачи топлива) из редукторов поступает в емкости, вытесняет из них горючее и окислитель и через коллекторы подает их в двигатели.
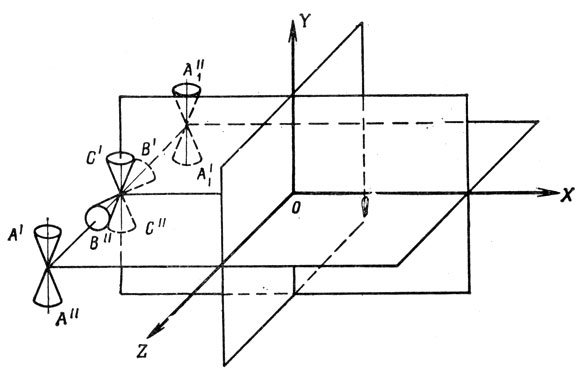
Рис. 8.3. Расположение двигателей ориентации в одной плоскости
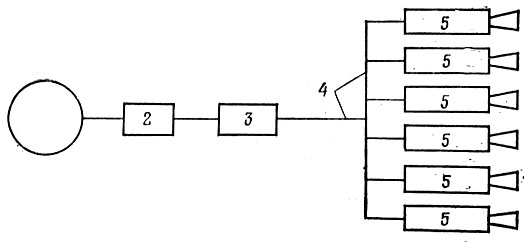
Рис. 8.4. Система двигателей ориентации, работающих на сжатом газе: 1 - баллон со сжатым газом; 2 - запорный клапан; 3 - редуктор; 4 - коллектор; 5 - двигатели ориентации
Преимуществами ДО на сжатом газе являются крайняя простота конструкции и отсутствие загрязнения окружающего КА пространства, что может быть весьма существенно при проведении некоторых научных экспериментов. Такие ДО использовались на КК «Восток», «Восход», на межпланетных КА, на спутниках связи «Молния-1» и др.
Преимуществами ДО на одно- или двухкомпонентном топливе являются более высокая экономичность (более высокие удельные импульсы) и меньшая масса всей ДУ: сжатый газ не играет здесь роли рабочего тела, и тяжелые емкости могут быть сделаны относительно малыми. Подобные ДО используются на КК «Союз», орбитальных станциях «Салют» и др.
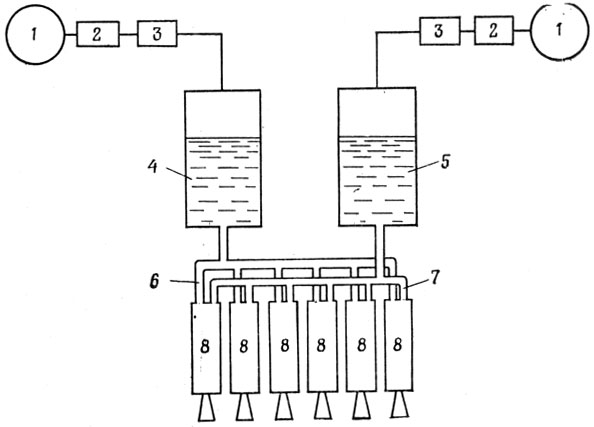
Рис. 8.5. Система двигателей ориентации, работающих на двухкомпонентном топливе: 1 - баллоны со сжатым газом; 2 - запорные клапаны; 3 - редукторы; 4 - бак горючего; 5 - бак окислителя; 6, 7 - коллекторы; 8 - двигатели ориентации
Общим недостатком рассмотренных ДО является необходимость расхода массы рабочего тела при каждом включении, запас которого всегда ограничен.
Возможность сравнительно простого способа пополнения бортовых запасов электроэнергии с помощью солнечных батарей делает весьма перспективным применение гироскопических, силовых стабилизаторов (ГСС) - исполнительных органов, способных ограничиться потреблением только электроэнергии. Поскольку ГСС создают реактивные моменты (а не силы), не существует проблемы размещения их в корпусе КА в согласии с положением его центра масс, так как их можно устанавливать в любом месте, учитывая только удобство компоновки и направление главных центральных осей инерции.
Существует три типа ГСС: одно-, двух- и трехстепенные.
Одностепенные ГСС - маховики (рис. 8.6) имеют оси роторов, параллельные осям КА; изменение оборотов ротора А' (изменение его кинетического момента Гх) приводит к вращению корпуса КА вокруг оси ОХ в противоположном направлении, при этом момент, приложенный к корпусу КА, будет численно равен и противоположен по знаку моменту, приложенному к ротору гсс.
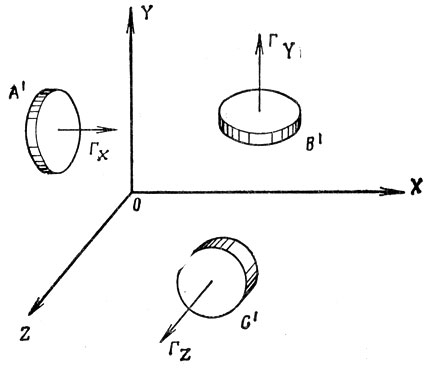
Рис. 8.6. Расположение одностепенных гироскопических силовых стабилизаторов (маховиков) относительно главных центральных осей инерции КА
Двухстепенные ГСС (рис. 8.7) обладают двумя степенями свободы, из которых одна связана с вращением ротора (кинетический момент ротора Г), а другая - с поворотом гироузла, несущего ротор, установленного на корпусе КА и способного вращаться вместе с установленным в нем ротором вокруг оси ξ. Развиваемый таким ГCC управляющий момент
MA=Г × ε(8.1)
где ε - угол поворота гироузла.
Из выражения (8.1) видно, что кинетический момент ротора должен быть возможно большим, а следовательно, ротор должен вращаться с постоянной, возможно большей угловой скоростью. Поворот гироузла вокруг оси ξ потребует приложения некоторого малого момента m. Следовательно, двухстепенный ГСС обладает свойством «усиления» моментов: малый момент т, приложенный к гироузлу, вызывает большой момент МА, приложенный к корпусу КА.
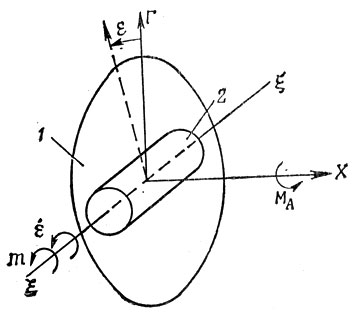
Рис. 8.7. Схема двухстепенного гироскопического силового стабилизатора: 1 - корпус КА; 2 - гироузел; Г - вектор кинетического момента ротора гироузла; m - момент, приложенный к гироузлу; МА - результирующий момент, приложенный к корпусу КА
Трехстепенные ГСС (рис. 8.8) представляют собой силовой ротор с кинетическим моментом Г, установленный в кардановом подвесе. Моментные устройства, создающие моменты mХ и mY, вызывают прецессию гироскопа, при которой численно равные им, но противоположные моменты будут прикладываться к корпусу КА.
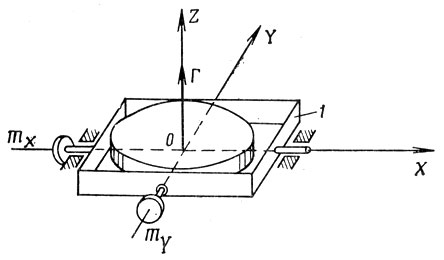
Рис. 8.8. Схема трехстепенного гироскопического силового стабилизатора: 1 - внешняя рама карданова подвеса; Г - кинетический момент ротора; mX и mY, - моментные датчики, вызывающие прецессию ротора
Таким образом, минимальное количество ГСС, позволяющее управлять по всем осям, равно трем для одно- и двухстепенных ГСС и двум для трехстепенных, хотя и это количество не является наилучшим. Вполне оправдано только применение трех одностепенных ГСС, так как они в процессе функционирования не изменяют положения осей роторов относительно корпуса КА. Двухстепенные или трехстепенные ГСС в процессе функционирования изменяют положение осей силовых роторов вследствие прецессии гироскопов относительно корпуса КА, что в конечном итоге может привести к тому, что в некоторый момент времени управление по какой-то связанной с корпусом КА оси станет невозможным до изменения расположения осей роторов. Это неприятное свойство можно избежать установкой на КА избыточного количества ГСС.
Общим недостатком всех ГСС является их неспособность к длительному противодействию внешнему возмущающему моменту одного знака. В реальных полетных условиях внешние возмущающие моменты практически всегда имеют постоянную составляющую, которая и «выводит из строя» ГСС. Суть этого явления заключается в том, что ГСС лишь перераспределяют кинетический момент между корпусом КА и ГСС и если этот суммарный кинетический момент под действием внешних возмущений будет возрастать, а кинетический момент корпуса КА исходя из требований к ориентации оставаться постоянным, то наступит момент, когда ГСС окажутся уже не в состоянии «всасывать» вращательный импульс, создаваемый внешним возмущающим моментом. Это. связано с тем, что одностепенные ГСС не способны к беспредельному увеличению угловой скорости вращения ротора, а двух- и трехстепенные ГСС не могут сохранять положение осей своих роторов близким к исходному.
Для обеспечения длительной работы ГСС требуется систематическая «разгрузка» их от накопленного кинетического момента. Это возможно выполнить несколькими методами:
допустимо использование того же внешнего момента, изменив его знак на обратный путем резкого изменения ориентации КА; недостатком такого метода является довольно частое изменение ориентации, что не всегда допустимо;
можно компенсировать воздействие внешнего возмущающего момента, действующего на КА, включением второго контура исполнительных органов, что не требует частых переориентации; если во втором контуре применить ДО, то включение их в направлении, противоположном постоянной составляющей внешнего момента на нужное время, приведет ГСС в исходное состояние. Казалось бы, что наличие ДО и необходимость их включений делают бессмысленным использование ГСС, но это не так: работая во втором контуре исполнительных органов, ДО будут компенсировать лишь постоянную составляющую внешних моментов, которая обычно мала по сравнению с их периодической составляющей; недостатком такого метода является необходимость расхода массы;
наконец, можно применять во втором контуре магнитопривод, взаимодействующий с магнитным полем Земли. В этом случае, хотя и отсутствует расход массы рабочего тела, увеличивается расход энергии и появляется необходимость установки относительно массивных магнитоприводов. Этот метод использован на КА «Метеор».
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить активную ссылку на страницу источник:
http://12apr.su/ 'Библиотека по астрономии и космонавтике'