2.2. СОСТАВ
Диапазон размеров и массовых характеристик автоматических КА очень широк: от КА-карликов с массой в единицы или десятки килограммов до КА-гигантов, имеющих массу, исчисляемую тоннами. Разнообразны и их конструктивно-компоновочные схемы. Однако, несмотря на значительные внешние отличия, в основе построения автоматических КА лежат определенные общие закономерности. В общем случае автоматический КА свободен от ряда ограничений, связанных с разработкой пилотируемого КА, и имеет большее разнообразие форм, размеров и более широкий, чем у пилотируемых КА, диапазон массовых характеристик. Автоматические КА более просты по составу бортовых систем, агрегатов и конструкции, хотя отдельные их системы и элементы конструкции могут быть более сложными, чем у пилотируемых. Так, для осуществления стыковки в космосе, для забора лунного грунта и доставки его на Землю, для решения задач навигации автоматические системы имеют более сложное построение, чем средства, используемые экипажем.
Состав и построение КА определяют такие факторы, как:
особенность условий космического полета (вакуум, невесомость, радиация и т. п.) и условий совместного полета с ракетой-носителем (перегрузки, вибрации, акустическое воздействие и т. п.);
необходимость использования для управления полетом КА наряду с бортовыми средствами управления канала связи с Землей;
особенность динамики орбитального полета, который в основном происходит под действием сил тяготения и реактивных сил.
Указанные факторы можно считать общими для любого КА независимо от его назначения. Условия космического полета требуют введения в состав КА средств, обеспечивающих надежную защиту аппаратуры от воздействия радиации, вакуума, микрометеоров, создания системы терморегулирования для поддержания температуры КА в пределах, допустимых по условиям обеспечения функционирования всех его элементов. Условия полета, как правило, не накладывают серьезных ограничений на внешние обводы КА и не требуют придания им обтекаемой аэродинамической формы, характерной для атмосферных летательных аппаратов, что, в основном, и объясняет многообразие конструктивно-компоновочных схем КА. Однако в отдельных случаях, не являющихся типичными для КА как летательного аппарата, его облик может определяться требованиями обеспечения полета в атмосфере (например, спускаемые аппараты или капсулы, совершающие посадку на Землю, автоматические межпланетные станции, предназначенные для посадки на планеты, имеющие атмосферу, и т. п.).
Для управления полетом автоматический КА должен иметь в своем составе радиотехнический комплекс и комплекс средств управления, обеспечивающие так называемый автономный режим полета КА, при котором управление осуществляется только бортовыми системами, а также режим с использованием радиоуправления с Земли, при котором предусмотрен обмен информацией между КА и наземным комплексом управления (НКУ) полетом.
Особенностью динамики орбитального полета является то, что для межорбитальных переходов (изменения высоты, наклонения или других параметров орбиты, перехода с орбиты на траекторию спуска на Землю или планету и т. п.) и поддержания определенного положения КА в космическом пространстве, т. е. ориентации, КА должен иметь реактивную двигательную установку.
В общем случае в состав автоматического КА входят полезная нагрузка, служебные системы, конструкция и двигательные установки.
Полезная нагрузка - это аппаратура или средства, непосредственно реализующие решение задачи, поставленной перед КА.
Служебные системы обеспечивают функционирование КА в процессе полета (управление, контроль, электроснабжение, радиосвязь, температурный режим и т. д.). К ним относят:
систему ориентации и управления движением (СОУД), обеспечивающую постоянную или периодическую ориентацию КА в режиме, необходимом для решения целевых задач полета, управление процессами коррекции орбиты, межорбитальными переходами, выполнение программных разворотов, закрутки аппарата, навигационных измерений и других задач управления движением;
систему электропитания (СЭП), снабжающую потребителей электроэнергией на всех этапах полета;
систему управления бортовым комплексом (СУБК), реализующую программно-логическое и электросиловое управление бортовыми системами;
бортовой радиотехнический комплекс (БРТК) для связи с наземным комплексом управления полетом с целью решения задач обмена командно-программной информацией, проведения траекторных измерений, передачи телевизионного изображения и информации от системы бортовых измерений;
систему бортовых измерений (СБИ) для сбора и передачи на Землю через собственные передатчики или БРТК телеметрической информации о функционировании КА, в том числе о результатах работы научной аппаратуры, систем и средств полезной нагрузки;
систему обеспечения теплового режима (СОТР) для поддержания температуры полезной нагрузки, систем, конструкции и ДУ в необходимом для их функционирования диапазоне.
Конструкция - это силовая основа КА, объединяющая все его составные части в единое целое и обеспечивающая их защиту от неблагоприятных воздействий космических условий и условий совместного полета с ракетой-носителем, а также механизмы и средства, участвующие в выполнении задач полета.
Двигательные установки реализуют управление движением центра масс КА, изменяя скорость его движения.
Состав и построение КА различных классов рассмотрим на примере связного ИСЗ «Молния-1», автоматической лунной станции «Луноход-1» и автоматической межпланетной станции (АМС) «Венера-9».
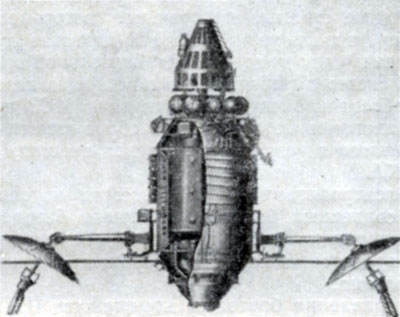
Рис. 2.1. Спутник связи «Молния-1»
Связной ИСЗ «Молния-1» (рис. 2.1) предназначен для ретрансляции телевизионных программ и осуществления дальней телефонной и телеграфной связи, действует с 1965 г. и входит в состав системы дальней космической связи, работая совместно с наземными радиостанциями системы «Орбита». «Молния-1» - это космический аппарат массой 1500 кг и максимальным размером в поперечнике 8 м, выводится на сильно вытянутую эллиптическую орбиту ИСЗ с высотой апогея 40000 км, расположенного над северным полушарием и периодом обращения 12 ч.
Полезной нагрузкой является бортовой ретранслятор с антенно-фидерной системой, обеспечивающий прием радиосигнала с Земли, его усиление и передачу на Землю. Для обеспечения энергетических характеристик передающего радиоканала используется остронаправленная параболическая антенна, ориентируемая на Землю.
Система ориентации и управления движением обеспечивает:
длительную ориентацию ИСЗ на Солнце (для системы электропитания) и наведения параболической антенны на Землю;
кратковременную ориентацию и проведение коррекции орбиты (ориентацию продольной оси по или против вектора скорости в месте включения корректирующей двигательной установки в зависимости от необходимости выдачи тормозного или разгонного корректирующего импульса, управление двигательной установкой, стабилизацией во время ее работы);
выдачу управляющих сигналов на электроприводы параболической остронаправленной антенны для ее наведения на Землю.
В состав СОУД входят:
чувствительные элементы - оптические датчики ориентации на Солнце, инфракрасные и оптические датчики ориентации на Землю;
счетно-решающие и коммутирующие устройства;
исполнительные органы, включающие мотор-маховик гироскопического типа (используется также в качестве чувствительного элемента системы) для поддержания длительной ориентации ИСЗ и реактивную систему, работающую на запасах газообразного рабочего тела, обеспечивающую стабилизацию ИСЗ при работе двигательной установки и периодический сброс кинетического момента, накапливаемого в результате действия внешних возмущающих моментов на КА.
Система электропитания (СЭП) состоит из генератора электроэнергии- солнечных батарей, буферных батарей - аккумуляторов, накапливающих электроэнергию, расходуемую в сеансах связи и при проведении коррекции орбиты, блоков логики, контроля и управления.
Система управления бортовым комплексом (СУБК) обеспечивает распределение, коммутацию (включение и выключение) электроэнергии, защиту цепей от короткого замыкания, а также программно-временное управление основными полетными операциями (сеансами работы ретранслятора, проведением совместно с СОУД коррекций орбиты, сеансов связи с наземным комплексом управления) и включает блоки логики, программно-временные устройства, блоки силовой коммутации и защиты, бортовую кабельную сеть.
БРТК состоит из приемопередающих средств, антенно-фидер-ной системы всенаправленного действия, блоков логики, формирования точного бортового времени, дешифрирования и преобразования командно-программной информации.
Система обеспечения теплового режима обеспечивает поддержание температуры газа в гермоотсеке, температуры ДУ и элементов, расположенных на внешней поверхности отсека. СОТР имеет в своем составе радиационные теплообменники холодного и горячего контуров (установлены снаружи гермоотсека) соответственно для отвода или подвода тепла к системе, газожидкостные теплообменники гермоотсека, обеспечивающие "температуру газа отсека, гидравлическую систему (насосы, компенсаторы, трубопроводы, жидкость-теплоноситель, арматуру) для переноса тепла между радиационными и газожидкостными теплообменниками и обеспечения температурного режима элементов внешних установок, средства управления и контроля (управляющие и телеметрические датчики, блоки автоматики).
Основой конструкции ИСЗ «Молния-1» является герметичный цилиндрической формы корпус приборного отсека. К нему с внешней стороны крепятся панели солнечных батарей СЭП (устанавливаются в рабочее положение после вывода на орбиту), двигательная установка, радиационные теплообменники СОТР, антенны ретранслятора и БРТК, датчики ориентации на Солнце и Землю, баллоны с газообразным рабочим телом и микродвигатели исполнительных органов СОУД.
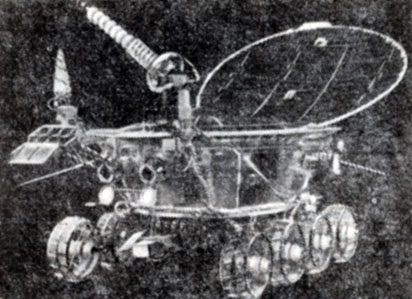
Рис. 2.2. «Луноход-1»
Двигательная установка состоит из ЖРД многоразового действия, работающего на высококипящих компонентах топлива, баков для компонентов, системы подачи топлива (вытеснительного типа) и регулирования работы ЖРД.
«Луноход-1» (рис. 2.2) - подвижная лаборатория массой 750кг и максимальным габаритным размером 3 м для изучения Луны была доставлена на поверхность Луны с помощью автоматической станции «Луна-17».
Полезной нагрузкой «Лунохода-1» являются системы и средства для изучения топографических особенностей лунной поверхности и физико-механических свойств грунта: телевизионные системы (панорамная и малокадровая), спектрометрическая аппаратура определения химического состава грунта, аппаратура исследования радиационной обстановки на поверхности Луны, прибор для внедрения в грунт штампа, датчики (пути, угла крена, дифферента), уголковый отражатель для лазерной локации и аппаратура исследования рентгеновского космического излучения.
Управление передвижением «Лунохода-1» осуществлялось системой, включавшей наземную и бортовую части, при этом основная роль в выборе параметров, логики управления и решении навигационной задачи при движении возлагалась на операторов и наземную аппаратуру. Бортовая часть системы дистанционного управления обеспечивала реализацию команд операторов и выдачу на Землю данных об угловом положении «Лунохода-1». СОУД «Лунохода-1» включала гироскопические датчики курса и вертикали, счетно-решающие и коммутирующие блоки.
Функции приема команд управления, передачи на Землю сигналов подтверждения исполнения команд, передачи телевизионного изображения и телеметрической информации выполнял БРТК, включавший приемопередающие радиоустройства, телевизионную систему (панорамные камеры для навигации и научных исследований и камеры малокадрового телевидения для управления движением и научных исследований), остронаправленную антенну для передачи телевизионного изображения и малонаправленную антенну для обмена с Землей другими видами информации, блоки преобразования, дешифрирования сигналов, логики и автоматики.
Сбор информации, ее хранение и передачу в БРТК обеспечивала СБИ, имевшая датчики, локальные коммутаторы, систему измерений температур, запоминающее устройство и блоки сопряжения.
СОТР должна была обеспечить заданный диапазон температур конструкции и приборов как в условиях лунного дня (температура поверхности 400 К), так и в периоды лунной ночи (температура поверхности 100 - 120 К). На луноходе использовалась активная газовая циркуляционная система, включавшая контуры нагрева с изотопным источником тепла и охлаждения с радиационным теплообменником (верхнее днище приборного отсека), который на время лунной ночи закрывался теплоизолированной крышкой. Кроме того, в состав СОТР входили средства регулирования, контроля, управления системой, а также пассивные средства терморегулирования (тепловые «мосты», изоляция и др.).
Выполняя традиционные для КА функции, СЭП и СУБК состояли из солнечной батареи с механизмом поворота для ориентации на Солнце, буферной батареи для электроснабжения в сеансах связи и в период лунной ночи, средств распределения и коммутации электроэнергии, бортовой кабельной сети, блоков автоматики и контроля.
Конструкция лунохода включала приборный отсек в форме усеченного конуса с выпуклыми верхним и нижним днищами и самоходное шасси с 8 колесами, имеющими индивидуальные подвеску и электрические приводы, и датчиком пройденного пути. На внешней поверхности отсека располагались антенны БРТК, телевизионные камеры, датчики научно-исследовательской аппаратуры, оптический уголковый отражатель. Компоновочная схема лунохода была выбрана с учетом необходимости обеспечения его устойчивости при перемещении по поверхности сложного рельефа.
Автоматическая межпланетная станция «Венера-9» (рис. 2.3) предназначалась для изучения поверхности и атмосферы Венеры, имела массу около 4940 кг и была запущена в июне 1975 г. Она была выведена на траекторию полета к планете с околоземной круговой орбиты высотой 170 км. В процессе ее полета к планете были проведены две коррекции траектории. При подлете к планете от нее был отделен СА, а сама АМС переведена на орбиту искусственного спутника Венеры (ИСВ).
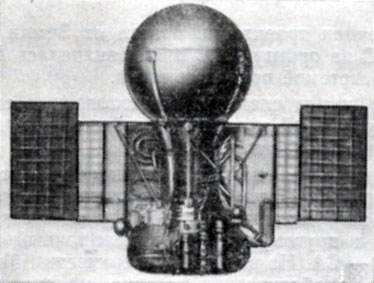
Рис. 2.3. АМС «Венера-9»
Полезной нагрузкой станции являлись фотометры для получения изображения поверхности в оптическом диапазоне и измерения яркости и рассеивающей способности атмосферы, датчики давления, температуры и перегрузки, анемометр для измерения скорости ветра, спектрометры для измерения химического состава и содержания радиоактивных элементов, плотномер для определения плотности грунта.
СОУД станции включала бортовую цифровую вычислительную машину, блоки логики, гиростабилизированную платформу, оптико-электронные приборы ориентации на Солнце, звезды, Землю, усилительно-преобразующие устройства и исполнительные органы. СЭП станции была построена на базе солнечных генераторов электроэнергии и совместно с СУБК обеспечивала электроснабжение всех потребителей АМС. В состав БРТК входили антенно-фидерные устройства, приемники и передатчики, работающие в различных диапазонах длин волн, радиоретрансляционная и телеметрическая аппаратура, средства 'автоматики и контроля. Особенностью радиотехнического комплекса было использование БРТК станции (после ее перевода на орбиту ИСВ) в качестве ретранслятора для передачи на Землю информации от спускаемого аппарата при его посадке и с поверхности Венеры.
СОТР станции, кроме традиционных задач термостатирования АМС в процессе космического полета, обеспечивала температурный режим СА в процессе его спуска в атмосфере Венеры и при нахождении на ее поверхности в условиях, когда температура атмосферы и поверхности составляет 730 К. СОТР станции имела контуры нагревания и охлаждения с радиаторами, многослойную экранно-вакуумную изоляцию и систему циркуляции газа в герметичном отсеке; кроме того, спускаемый аппарат, имея внешнюю и внутреннюю теплоизоляцию, был помещен в сферический многослойный корпус, предназначенный для его защиты от высокой температуры ударной волны на начальном участке снижения в атмосфере.
Для коррекции траектории полета от Земли к Венере и для перевода АМС на орбиту ИСВ предназначалась ДУ с ЖРД и вытеснительной системой подачи топлива.
«Венера-9» имела сложную компоновочную схему: собственно станцию и спускаемый аппарат, способные функционировать после их разделения как отдельные КА.
Основным силовым элементом станции являлся блок баков ДУ, имеющий цилиндрическую форму с двумя выпуклыми днищами к одному из которых крепился приборный отсек, выполненный в форме тора, к другому через промежуточный силовой элемент (переходник) - СА. На внешней поверхности АМС имелись остронаправленная параболическая антенна, малонаправленные антенны БРТК, оптико-электронные приборы и исполнительные органы СОУД, радиаторы СОТР, солнечные батареи СЭП, блоки научной аппаратуры.
Основным силовым элементом СА являлся прочный сферический корпус, рассчитанный на работу при наружном давлении свыше 10 МПа. На верхней части корпуса находилось жесткое аэродинамическое тормозное устройство с цилиндрическим контейнером, имевшим отсеки для парашютной системы и научной аппаратуры а на нижней - посадочное устройство тороидальной формы.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить активную ссылку на страницу источник:
http://12apr.su/ 'Библиотека по астрономии и космонавтике'