2.3. ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ
Проектирование КА начинается с выбора его проектных параметров, исходными данными для которого являются:
технические требования к КА (назначение, область использования, основные эксплуатационные характеристики и др.);
ограничения, определяющие необходимость использования уже созданных средств космической техники (ракет-носителей, наземного комплекса управления полетом и др.);
требования по обеспечению технико-экономических и других показателей.
Проектирование КА имеет три основных этапа:
этап технических предложений позволяет наметить варианты построения КА и предварительно оценить его проектные параметры;
этап эскизного проектирования определяет принципы построения и основные параметры КА и всех его элементов, при этом допускает вариантность технических решений по некоторым особо сложным вопросам;
этап технического проектирования определяет все характеристики варианта КА, принятого для реализации, необходимые для разработки рабочей документации на составные части и на КА в целом.
Проектирование КА - это проектирование большой системы, оснащенной сложной и разнообразной по принципам построения и характеристикам аппаратурой и оборудованием, которые не существуют как автономные независимо функционирующие средства, а имеют связи между собой и с другими системами, не входящими в состав КА.
Основу процесса проектирования КА составляют исследования, завершающиеся выбором и подтверждением возможности реализации проектных параметров, обеспечивающих с заданными надежностью и эффективностью решение поставленной перед КА задачи при условии обеспечения минимальных экономических затрат на реализацию проекта, создание и эксплуатацию КА.
Сущность исследований заключается в анализе внутренних связей в пределах КА и связей КА с другими средствами (внешние связи).
К внешним относят связи с НКУ, РН, наземным комплексом подготовки пуска, комплексом средств и космических систем, с которыми будет взаимодействовать разрабатываемый КА в процессе полета. Эти связи, как правило, серьезно ограничивают выбор проектных параметров КА. Так, задачи управления полетом КА с участием Земли решаются во взаимодействии бортового радиотехнического комплекса и НКУ, при этом, чем лучше приспособлен НКУ вновь разрабатываемого КА к решению конкретных задач, тем проще бортовой радиотехнический комплекс и КА в целом. Однако НКУ является универсальным комплексом и предназначен для управления многими КА различного назначения, поэтому проектирование нового КА обычно начинают исходя из использования уже созданного НКУ и лишь в случае, когда его принцип построения и характеристики препятствуют решению целевой задачи, рассматривают возможность изменения его характеристик.
Из этого примера видно, что внешние связи могут серьезно ограничивать выбор проектных параметров КА, но в некоторых случаях эти ограничения могут быть сведены к минимуму за счет одновременной проектной разработки и создания ракеты-носителя, космического аппарата и средств их обслуживания. Именно таким путем были разработаны космические программы исследования планет Солнечной системы с использованием автоматических межпланетных станций «Марс», «Венера», программа пилотируемых полетов космических кораблей «Восток», программа лунных экспедиций «Сатурн - Аполлон» и др.
Внутренние связи - это связи между элементами КА. В качестве примера рассмотрим СОУД с целью раскрытия характера ее связей с другими системами, полезной нагрузкой, конструкцией и двигательными установками. СОУД (рис. 2.4) автоматического КА имеет, как правило, три главные функциональные составляющие: чувствительные элементы (датчики), бортовой цифровой вычислительный комплекс или счетно-решающие блоки и систему исполнительных органов (в качестве исполнительных органов могут использоваться микродвигатели двигательной установки). Кроме того, в состав СОУД входят средства информационно-логического и электросилового согласования трех главных составляющих между собой и СОУД в целом с другими системами КА.
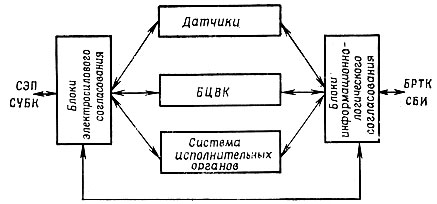
Рис. 2.4. Структурная схема СОУД
Чувствительные элементы (датчики) обеспечивают получение информации о положении КА в пространстве и о характере углового движения аппарата. Большую группу датчиков составляют датчики внешней ориентации - электрооптические приборы, использующие в качестве опорных ориентиров Солнце, Землю, Луну и звезды, а также инфракрасные приборы. Другую значительную группу представляют гироскопические датчики, функционирование которых основано па свойствах быстро вращающегося волчка - гироскопа, способного «запоминать» заданное угловое положение на длительное время полета. В ряде случаев в качестве датчиков используют радиотехнические средства (радиовысотомеры, радиосистемы сближения и стыковки, радионавигационное и другое оборудование).
Сигналы датчиков, преобразованные в бортовом цифровом вычислительном комплексе (БЦВК) или блоках логики, поступают на исполнительные органы, которые создают управляющие моменты за счет использования реактивных сил микродвигателей, прецессии силовых гироскопов и т. п. В зависимости от решаемой задачи СОУД должна обеспечивать ориентацию КА с различной точностью: от долей угловых секунд при астроориентации для научных наблюдений до 10-20° при ориентации солнечных батарей. БЦВК кроме логической обработки сигналов от датчиков обеспечивает, как правило, управление всеми процессами, связанными с движением относительно центра масс (угловое движение) и движением центра масс (изменение направления и скорости движения), включая управление процессами функционирования двигательной установки.
СОУД имеет тесные и разнообразные связи с БРТК и СБИ. Через БРТК осуществляются обмен информацией между БЦВК и наземным вычислительным комплексом, траекторные измерения, сверка бортового и наземного времени, передача данных о функционировании СОУД на Землю по радиотелеметрическому каналу с использованием СБИ.
В свою очередь СОУД обеспечивает выдачу целеуказаний или непосредственное наведение остронаправленных антенн БРТК, а иногда и управление другими средствами радиокомплекса. СОУД, как правило, участвует в синхронизации и управлении СБИ; в ряде случаев СОУД и СБИ совместно решают задачу контроля и диагностики функционирования КА в целом. Вообще БЦВК, как правило, обеспечивает обслуживание всех бортовых потребителей, нуждающихся в вычислительных средствах. СОУД тесно связана и с конструкцией. Ее датчики внешнего ориентирования требуют значительных зон обзора, особой защиты от бликов, не терпят соседства с микродвигателями системы исполнительных органов (СИО) и ДУ, что приводит к затруднению в размещении на корпусе КА датчиков СОУД и вынуждает приспосабливать конструкцию специально под их установку. Усугубляется эта задача и проблемами обеспечения точности взаимного положения оптических и гироскопических датчиков (от угловых минут до угловых секунд), датчиков и ДУ, датчиков и СИО, иногда датчиков СОУД и датчиков научной аппаратуры. Нередко датчики «обрастают» блендами, защитными крышками, размещаются на штангах.
СОУД предъявляет определенные требования к центровке, моментам инерции и положению главных осей инерции КА (обеспечиваются компоновкой и конструкцией КА), определяет предельно допустимое время полетных операций и характер построения механизмов, предназначенных для разделения отсеков КА, стыковки КА в космосе, приведения элементов конструкции и систем в рабочее и транспортное положения и т. п.
При наличии солнечных батарей СОУД обеспечивает их ориентацию на Солнце, а в ряде случаев определяет и режимы закрутки или ориентации, необходимые для обеспечения теплового режима КА. Естественны также связи СОУД с СЭП, СУБК (обеспечение электропитания), СОТР (обеспечение теплового режима), ДУ (управление режимами функционирования).
Сложность и многообразие внешних и внутренних связей определяют в процессе проектирования необходимость одновременного
проведения различных исследований, основными из которых являются:
исследование возможных принципиальных схем решения целевой задачи;
выбор баллистической схемы полета;
исследование принципов управления полетом, разработка программы полета;
выбор компоновки и конструктивно-силовой схемы КА;
анализ баланса массовых, электроэнергетических и ресурсных характеристик КА, определение необходимых запасов компонентов топлива, рабочих тел систем и двигательных установок, расходуемых в процессе полета;
выбор состава, принципов построения и основных характеристик бортовых систем, агрегатов и двигательных установок.
Исследование возможных принципиальных схем решения целевой задачи зависит от конкретной поставленной перед КА задачи. Так, задача определения с высокой точностью химического состава лунного грунта может быть решена либо за счет проведения анализа грунта с помощью средств, доставленных па Луну, и последующей передачи результатов анализа по радиотелеметрическому каналу на Землю, либо за счет забора грунта и последующей доставки его на Землю. Естественно, что автоматические КА для реализации этих двух возможных вариантов будут существенно отличаться по построению, компоновке, массовым и другим характеристикам, так как первый вариант приведет к развитию в составе КА средств, обеспечивающих анализ химического состава грунта, т. е. самой исследовательской аппаратуры, систем ее обслуживания и радиотехнических средств передачи данных на Землю, а второй - к оснащению КА средствами забора грунта и доставки его в возвращаемой на Землю капсуле. В ряде случаев одновременно с исследованием возможных принципиальных схем решения целевой задачи необходимы конкретные исследования по средствам ее реализации. Так, для варианта доставки грунта на Землю уже на ранней стадии проектирования требовалось проведение комплекса научно-технических исследований, связанных с выбором принципов построения и характеристик средств забора грунта, без которых невозможно определить реализуемость данного варианта и оценить затраты массы, потребную энергетику СЭП и другие характеристики будущего КА.
Баллистические схемы полета автоматических КА имеют множество вариантов, каждый из которых приводит КА к цели, но с различными затратами времени и топлива двигательных установок. В качестве примера выбора баллистической схемы полета рассмотрим автоматическую лунную станцию (АЛС), предназначенную для посадки в заданном районе Луны.
Возможны два принципиально отличающиеся варианта баллистической схемы полета АЛС: первый - «прямая» посадка, т. е. посадка непосредственно с траектории перелета Земля-Луна без выхода на орбиту искусственного спутника Луны (ИСЛ), и второй - посадка с предварительным выведением АЛС на орбиту ИСЛ. Первый вариант был реализован в программах «Сервейер», «Луна» (при мягкой посадке АЛС «Луна-9»), второй -при высадке «Луноходов», в программе «Аполлон» и АЛС для доставки лунного грунта. При выведении станции на орбиты ИСЛ возможны также варианты баллистических схем, отличающиеся последовательностью формирования и параметрами орбит ИСЛ. Надежность и точность посадки в заданный район Луны в баллистических схемах второго варианта существенно выше, чем первого, однако суммарное время полета от старта с Земли до посадки во втором варианте значительно (в 1,5 - 2 раза) больше. Баллистическая схема полета определяет также требования к системе ориентации и управления движением (необходимые режимы ориентации, требуемые точности ориентации, точности стабилизации при работе ДУ и т. д.), к двигательным установкам (тяге, необходимости и пределам ее регулирования, запасам топлива и т. п.), к распределению ресурсов топлива по этапам полета, а также к проведению динамических операций, их последовательности и т. п., т. е. к программе полета. Как показали комплексные исследования, проведенные при разработке лунных КА, второй вариант баллистических с\ем является более предпочтительным. В связи с этим с середины 60-х годов в программах, предусматривающих посадку КА на поверхность Луны, используются баллистические схемы с предварительным выведением КА на орбиту ИСЛ.
Программа полета определяет последовательность проведения и характеристики полетных операций, их взаимосвязь, а также взаимодействие бортовых и наземных средств комплекса управления в процессе всего полета КА. Кроме временных характеристик и увязки функционирования всего комплекса взаимодействующих в процессе полета средств программа формирует требования к запасам расходуемых компонентов и является основой расчета их расхода в полете.
Значительное место при проектировании КА отводится выбору его компоновки.
Некоторые КА имеют достаточно простые внешние обводы и простую компоновочную схему. Для простой компоновочной схемы КА, как правило, выполненной в виде одного отсека, характерны обводы, представляющие геометрически правильную или близкую к ней конфигурацию, обычно симметричного вида (рис. 2.5), что не исключает наличия выносных элементов типа антенн, датчиков и т. п., выходящих за пределы конфигурации основных обводов.
Для сложной компоновки (рис. 2.6) характерны многоотсечные схемы, представляющие сочетание отсеков, агрегатов и двигательных установок различной конфигурации. Как правило, такая компоновка усложнена элементами соединения и отделения отсеков.
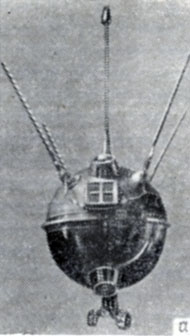
Рис. 2.5. Простые компоновочные схемы КА: а - АЛС «Луна-1» (СССР)

Рис. 2.5. Простые компоновочные схемы КА: б - научно-исследовательский ИСЗ «Ариабата» (Индия)
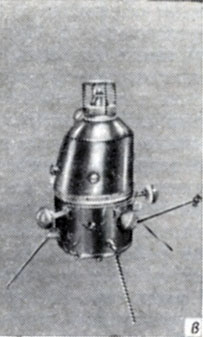
Рис. 2.5. Простые компоновочные схемы КА: в - ИСЛ «Луна-10» (СССР)
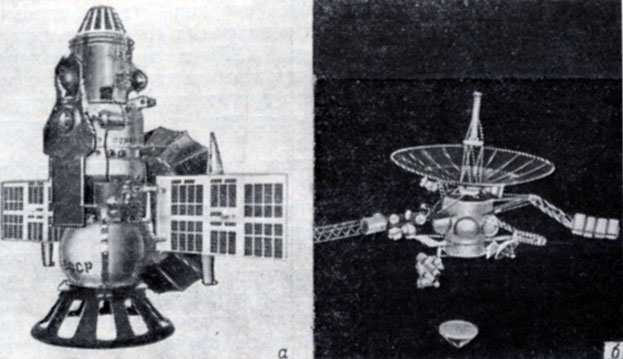
Рис. 2.6. Сложные компоновочные схемы КА: а - АМС «Венера-5» (СССР); б - АМС 'Вояджер' (США)
Сложны и компоновочные схемы, не имеющие ярко выраженных отсеков, объединяющие с помощью силовой конструкции отдельные агрегаты, блоки приборов и оборудования, причем каждая составляющая такой компоновочной схемы имеет свою, независимую от других составляющих конфигурацию.
Основные факторы, определяющие специфику построения КА как летательного аппарата (см. раздел 2.2), в значительной степени определяют и выбор компоновочной схемы КА. Однако кроме них на облик - компоновку конкретного КА влияют:
специфика целевой задачи и особенности полезного груза;
требования бортовых систем, агрегатов, двигательных установок к компоновке и конструкции;
условия размещения на ракете-носителе;
необходимость оптимизации характеристик, в первую очередь массовых.
Для иллюстрации закономерностей, определяющих общую компоновочную схему автоматического КА, рассмотрим автоматическую лунную станцию «Луна-16».
Автоматическая лунная станция «Луна-16» (рис. 2.7) предназначалась для взятия пробы лунного грунта и доставки его на Землю и состояла из посадочной и взлетной (ракета Луна-Земля) ступеней. Посадочная ступень обеспечивала участок перелета от Земли до Луны и мягкую посадку станции на Луну, причем коррекция орбит, сход с орбиты ИСЛ и гашение скорости для обеспечения мягкой посадки осуществлялись двигательной установкой посадочной ступени. После взятия грунта и переноса его в возвращаемый аппарат взлетная ступень АЛС обеспечивала старт с Луны, перелет от Луны к Земле и доставку возвращаемого аппарата в заданный район Советского Союза.
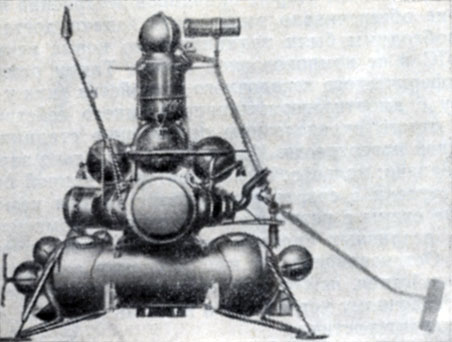
Рис. 2.7. Автоматическая лунная станция «Луна-16»
Взлетная ступень состояла из сферического возвращаемого аппарата, приборного отсека, топливных баков и двигательной установки и была смонтирована на посадочной ступени. Посадочная ступень включала приборный отсек, топливные баки, двигатель и некоторые другие элементы, объединенные в единую силовую конструкцию, к которой крепилось посадочное устройство. Посадочное устройство служило для гашения энергии удара станции в момент ее касания поверхности Луны с ограничением действующих на станцию перегрузок и для обеспечения ее устойчивости на поверхности Луны в целях сохранения после посадки положения, необходимого для старта взлетной ступени. На внешней поверхности посадочной ступени были установлены штанга с буровым механизмом, антенны и другие элементы.
Возможны и другие варианты компоновочных схем АЛ С (рис. 2.8). Первая АЛС, совершившая мягкую посадку на Луну («Луна-9»), имела сферическую форму и массу 100 кг; ее посадочное устройство было выполнено в виде мягкой надувной сферической оболочки, защищавшей станцию со всех сторон (посадочное устройство и средства вертикализации составляют примерно 30% массы всей станции). После гашения удара о поверхность и успокоения амортизатор сбрасывался, а станция, раскрывая «лепестки», устанавливалась нижней частью к поверхности.
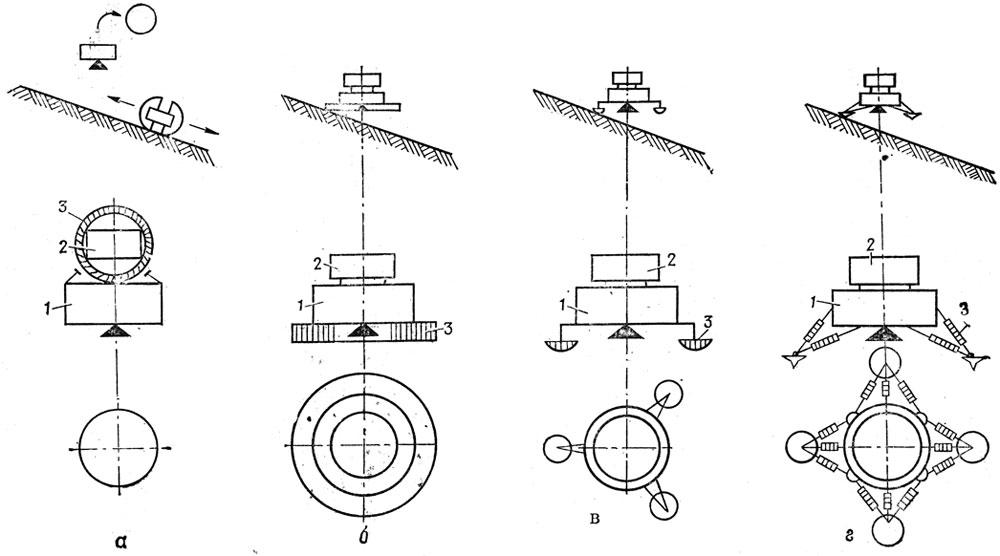
Рис. 2.8. Компоновочные схемы автоматических лунных станций (варианты): а - с отделением КА и сферическим амортизатором; б - г - без отделения КА; 1 - двигательная установка; 2 - КА; 3 - лунное посадочное устройство
Станция «Луна-16» при ее посадке на Луну имела массу 1900 кг - максимально допустимую при использовании разработанной РН. Применение старых принципов построения посадочного устройства не обеспечивало выполнение задачи доставки грунта с Луны. Необходимы были принципиально новые решения в построении АЛС и ее компоновочной схемы. Таким решением стал переход от сферического посадочного устройства (как у «Луны-9») к устройству с амортизаторами направленного действия, рассчитанному на строго определенную ориентацию станции в момент касания лунной поверхности. Могло быть несколько вариантов решения этой задачи: кольцевой амортизатор на донной поверхности посадочной ступени с сохранением отверстия для камеры ЖРД; многоопорные схемы с разным числом опор и размещением амортизаторов в различных силовых элементах посадочного устройства и т. д. Остановившись на использовании амортизаторов направленного действия, необходимо было определить основные требования к посадочному устройству и выявить факторы, от которых, зависят его характеристики.
Учитывая, что рельеф лунной поверхности достаточно сложен, в качестве расчетной была принята модель поверхности с общим уклоном, выпуклыми неровностями и кратером, соизмеримым с размерами посадочного устройства. Исходными данными для расчета посадочного устройства и определения его базы (максимального расстояния между опорами, касающимися грунта) кроме модели поверхности Луны стали геометрические и инерционные характеристики КА, ограничения по допустимым перегрузкам и другие данные.
В общем виде база посадочного устройства АЛС

(2.1)
где mАЛС - масса АЛС;
НЦТ - высота центра тяжести;
n - допустимая перегрузка;
j - моменты инерции;
α - расчетный уклон посадочной поверхности Луны;
q - удельная плотность лунного грунта;
V и ω -линейная и угловая скорости АЛС при соприкосновении с поверхностью Луны.
Параметры mАЛС, НЦТ,J, n определяют массово-инерционные и геометрические характеристики АЛС и допустимые нагрузки на нее; α, q - характеристики поверхности и грунта Луны; V, ω - параметры движения АЛС при ее соприкосновении с лунной поверхностью.
Возрастание параметров mАЛС, НЦТ, α, q, V, ω приводит к увеличению базы В посадочного устройства для обеспечения устойчивости АЛС. Расчеты показали, что с ростом базы В существенно увеличивается масса посадочного устройства и АЛС в целом, что одним из основных путей уменьшения массы является размещение тяжелых элементов станции в ее нижней части, т. е. смещение центра тяжести АЛС вниз.
Использование посадочных устройств направленного действия позволило существенно уменьшить их относительную массу и применительно к АЛС «Луна-16» обеспечить решение технически очень сложной задачи - доставки грунта z Луны при условии использования разработанной ранее ракеты-носителя.
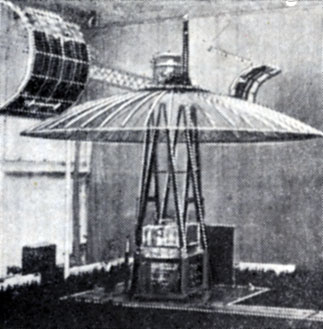
Рис. 2.9. «КА-антенна» (спутник связи ATS-VI)
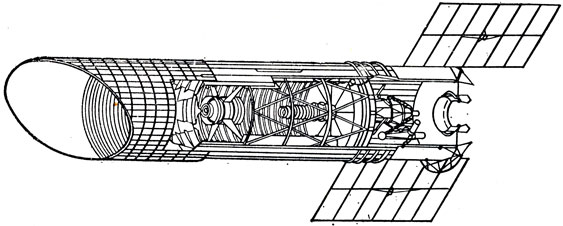
Рис. 2.10. «КА-телескоп» (телескоп-спутник-обсерватория ST)
В ряде случаев проектная разработка КА приводит к необходимости «гипертрофированного» построения отдельных его составляющих. Примерами таких КА могут служить автоматические «КА-антенны», облик которых определяет комплекс бортовых антенн (рис. 2.9), «КА-телескоп» (рис. 2.10), КА, компоновка которых базируется на конструкции двигательной установки, имеющей большие запасы топлива, или КА, габариты которых определяются смьно развитыми поверхностями солнечных батарей системы электропитания, и т. д. Появление космических аппаратов типа «КА-антенна» диктуется физическими закономерностями, и в первую очередь законами распространения радиоволн. Для иллюстрации рассмотрим упрощенную схему расчета энергетики линии связи КА - Земля.
Мощность электромагнитных волн, проходящих через площадку в 1 м2, перпендикулярную направлению на источник излучения (всенаправленная диаграмма передающей антенны)
(2.2)
где Рпер - мощность передатчика;
D - дальность от передатчика до приемника
Мощность, поступающая на вход приемника
(2.3)
где Sэф - эффективная площадь приемной антенны.
Мощность сигнала на входе приемника с учетом направленности передающей антенны и потерь
(2.4)
где ηпер - коэффициент полезного действия передатчика;
G - коэффициент направленного дейсвтия;
L - коэффициент, определяющий, во сколько раз уменьшается мощность принимаемого сигнала при прохождении через атмосферу и межпланетный газ.
Однако даже мощный сигнал не может быть зарегистрирован из-за помех, что вызывает необходимость превышения мощности сигнала над мощностью шумов, называемое отношением сигнал/шум,
(2.5)
Таким образом, дальность радиосвязи
(2.6)
где (Pc/Pш)мин - реальная чувствительность приемника.
Анализ выражения (2.6) показывает, что увеличение дальности радиосвязи при неизменной скорости передачи информации возможно за .счет увеличения мощности передатчика, направленности передающей антенны, эффективной площади наземной антенны и коэффициента полезного действия передатчика. Кроме того, увеличения дальности можно достигнуть и за счет выбора диапазона частот, в котором сокращаются потери в атмосфере, и некоторых других факторов.
В формуле (2.6) на первом месте стоит мощность передатчика. Можно ли за счет ее увеличения при всенаправленной передающей антенне обеспечить связь с межпланетными автоматическими станциями? Рассмотрим это на примере передатчика первого спутника Земли, имевшего мощность 1 Вт и "Дальность связи 10000 км. Для увеличения дальности связи до 100х10° км необходимо увеличить мощность передатчика в 108 раз, что составит 100000 кВт и будет соответствовать мощности средней земной электростанции. Вот почему при больших дальностях связи борьба идет за все потенциальные возможности увеличения энергетики линии связи. Наиболее эффективным, как правило, оказывается увеличение коэффициента направленного действия бортовой антенны КА, которое приводит к необходимости создания, как правило, остронаправленной параболической антенны. В связи с этим автоматические межпланетные станции даже при обеспечении относительно малых скоростей передачи информации оснащаются антенной с высоким коэффициентом направленного действия.
Потребность в остронаправленной антенне значительных размеров может появиться и при небольших удалениях КА от Земли в случаях, когда радиолиния должна обеспечивать высокую скорость передачи информации.
В конечном счете увеличение скорости передачи информации вызывает увеличение отношения сигнал/шум
(2.7)
где С - скорость передачи информации;
w - ширина полосы частот.
Как правило, наиболее рациональным способом увеличения скорости передачи информации является повышение коэффициента направленного действия антенны; поэтому некоторые спутники-ретрансляторы, выводимые на сильно вытянутую эллиптическую или геостационарную орбиту ИСЗ, имеют параболические антенны, которые иногда существенно превышают размеры отсеков с аппаратурой, т. е. все остальные, вместе взятые, элементы КА.
Основой проектной разработки любого нового КА является опыт разработки его предшественников и поиск новых принципов построения КА.
Комплексная разработка, включающая одновременные исследования основных характеристик КА, его внутренних и внешних связей - обязательное условие оптимизации его проектных параметров. Оптимизацию осуществляют, как правило, по комплексу показателей, основными из которых могут быть: надежность, стоимость, массово-энергетические характеристики, сроки разработки и др.
Так, при оптимизации, например, по стоимости из всех возможных технических решений, приводящих к достижению целевой задачи КА, должно быть выбрано решение, обеспечивающее минимальные экономические затраты на разработку и эксплуатацию данного КА.
Для оптимизации проектных параметров строится его математическая модель - совокупность математических выражений, описывающих КА и устанавливающих количественные связи между заданными условиями проектирования, оптимизируемыми проектными параметрами и критерием эффективности, т. е. математический эквивалент показателя (или показателей) совершенства КА. Требования к модели противоречивы: с одной стороны, она должна быть достаточно полной и учитывать все важнейшие факторы, от которых существенно зависит критерий эффективности, с другой - достаточно простой, определяющей в удобной (желательно - аналитической) форме зависимость между входящими в нее параметрами. Построение математической модели - наиболее важная и ответственная часть исследования, требующая глубоких знаний не только и не столько в математике, сколько в существе моделируемых взаимосвязей КА. Методика оптимизации учитывает этапы проектирования КА и предусматривает использование ряда последовательных приближений при выборе его проектных параметров.
На первом этапе проектирования основное внимание при оптимизации уделяют принципам построения КА, требованиям ко всем его составным элементам и средствам, с которыми он взаимодействует, а также факторам, наиболее сильно влияющим на надежность выполнения задачи полета, массовые и энергетические характеристики. На этом этапе также определяют вопросы, связанные со спецификой целевой задачи, с которыми ранее космическая техника не встречалась и по которым необходимы глубокие изыскания, научные и опытно-конструкторские работы. На последующих этапах оптимизации выбирают характеристики всех элементов КА, проводят уточнение его проектных параметров.
По мере развития космической техники совершенствуется и методика проектирования КА, которые постоянно усложняются в связи с необходимостью решения новых сложных задач.
Сегодня в космических программах роль автоматических КА значительна, и в будущем космические программы должны строиться на разумном сочетании запусков пилотируемых и автоматических КА. В связи с этим у автоматических КА есть не только прошлое и настоящее, а и большое будущее.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить активную ссылку на страницу источник:
http://12apr.su/ 'Библиотека по астрономии и космонавтике'