8.6. СБЛИЖЕНИЕ И СТЫКОВКА
Стыковка КА - совершенно необходимый элемент космического полета - предназначена для доставки экипажей и различных материалов на орбитальные станции, отделения и последующего присоединения к основному КА специализированных модулей.
Как уже говорилось выше, один из КА является «активным», т. е. совершает маневр сближения, а другой - «пассивным», т. е. не изменяет движения своего центра масс. Пассивный КА, в дальнейшем именуемый станцией, может в процессе сближения совершать повороты вокруг центра масс в целях облегчения задачи активному КА (например, станция может разворачиваться так, чтобы быть постоянно обращенной к активному КА своим стыковочным узлом).
При сближении КА работают две подсистемы системы управления сближением: подсистема наведения (управляющая движением центра масс) и подсистем а управления ориентацией; очевидно, что на станции допустима работа только второй подсистемы.
Участок наведения делится на участки дальнего и ближнего наведения. Дальнее наведение служит для выведения активного КА в зону, где возможно автономное ближнее наведение, т. е. в зону, в которой станция и активный КА находятся в условиях взаимной «видимости» (с учетом дальности действия установленной на обоих КА аппаратуры). Методы дальнего наведения ничем не отличаются от других маневров изменения орбиты КА и будут рассмотрены в следующем разделе. Ближнее наведение имеет целью сближение КА на некоторое малое расстояние и приведение их относительной скорости сближения в строго заданные пределы, ограниченные сверху прочностью КА, а снизу - надежной работой стыковочного узла. Нередко последний участок ближнего наведения выделяют в так называемый участок причаливания, в котором резко изменяется характер управления движением КА.
На основном участке ближнего наведения движение центра масс КА изменяется включением сравнительно мощного РД, установленного вдоль продольной оси активного КА (обычно этот же РД используется и для маневров коррекции траектории КА), причем для придания его импульсу нужного направления его запуску предшествует ориентация продольной оси КА. Таким образом, процесс сближения связан с целой серией переориентации, что недопустимо па участке причаливания, где управление движением центра масс активного КА и управление ориентацией обоих КА должны все время поддерживать оси стыковочных узлов на одной прямой, а сами узлы в направлении друг к другу, что определяет нормальную работу этих узлов после их касания. Поэтому на участке причаливания управление ведется так, чтобы при постоянной ориентации (т. е. без каких-либо поворотов) имелась возможность разгона и торможения активного КА, а также бокового смещения его продольной оси в любом направлении. Это возможно только при установке на КА нужного количества сравнительно малых двигателей, способных сообщать КА ускорения в продольном и двух боковых направлениях.
Первый способ управления, связанный с включением одного РД, иногда называют полярным, а второй, при котором работает группа малых РД, - декартовым (по аналогий с соответствующими системами координат). Теоретически для декартового управления вектором суммарной тяги достаточно шести РД (по два на ось, так как тяга РД не изменяет знака), однако их количество рационально удваивать, чем решаются сразу две задачи: во-первых, эти РД можно использовать и для управления ориентацией продольной оси КА, а во-вторых, не требуется точной установки оси такого бокового РД относительно центра масс КА; последнее трудно потому, что положение центра масс не всегда известно с нужной точностью, оно смещается при перемещениях членов экипажа, расходовании топлива и т. п. Кроме того, возможность «разнесения» РД упрощает компоновку КА, так как установке их точно по оси КА (для торможений и разгонов) мешает маршевый РД большой тяги и наличие стыковочного узла.
При управлении наведением КА на ближнем участке возможны два метода: первый, основанный на использовании законов орбитального движения (метод свободных траекторий), и второй - метод сближения по линии визирования (метод параллельного сближения); первый из них использует свойства орбитального движения. Сообщая активному КА кратковременные и малые импульсы, можно так изменить траекторию его полета, что в некоторый момент времени он окажется в непосредственной близости от станции, причем их относительные скорости будут лежать в пределах, обеспечивающих переход к процессу причаливания. Теоретически минимальное количество импульсов сближения сводится к двум, хотя практически их требуется несколько больше. Особенностью рассматриваемого метода является необходимость «привязки» его к орбитальной системе координат. Как известно, свойства измененного импульсом РД орбитального движения существенным образом зависят от направления импульса скорости относительно притягивающего центра (в данном случае центра Земли) и плоскости орбиты. Поэтому при целенаправленном использовании свойств орбитального движения система управления сближением должна располагать не только сведениями о взаимном положении активного КА и станции и их орбит, но и знать (с высокой точностью) положение активного КА относительно орбитальных осей. Следовательно, приборный состав аппаратуры сближения будет включать не только средства измерения дальности до станции, направления на станцию (линии визирования), относительных скоростей двух сближаемых КА, но и приборы, дающие направление местной вертикали и положение плоскости орбиты.
Метод сближения по линии визирования основан на сближении, происходящем по прямой, соединяющей два сближаемых КА. В этом случае угловая скорость поворота линии визирования в абсолютном пространстве все время остается равной нулю (в практической реализации - близкой к нулю) и сближаемые КА не испытывают боковых (относительно линии визирования) смещений в процессе сближения. Для реализации этого метода необходимо знание положения и характера движения КА друг относительно друга; их положения относительно центра Земли и плоскости орбиты несущественны.
Простота описанного метода сближения требует, однако, заметного увеличения запасов топлива, так как движение по прямой не является естественным свободным движением КА, поэтому естественную траекторию КА необходимо постоянно «спрямлять» путем включения РД. Избыточный сравнительно с методом свободных траекторий расход топлива будет тем больше, чем сильнее естественная траектория отличается от прямой. Из этого следует, что при сравнительно малых начальных дистанциях сближения, когда искривление свободной траектории мало, расходы топлива, потребные для сближения по обоим методам наведения, будут отличаться мало.
При разработке КА, предназначенного для активного сближения, необходим выбор метода сближения с полным учетом его преимуществ и недостатков. Обычно в основе такого выбора лежит учет сложности аппаратуры и потребных для сближения суммарных масс аппаратуры и топлива. Недостаток метода свободных траекторий заключается в относительно большой массе и сложности аппаратуры, которая будет окупаться лишь в случае заметного уменьшения массы потребного топлива, что, как уже говорилось, возможно только при достаточно больших начальных дистанциях автономного сближения.
Для грубых оценок можно считать, что расход топлива на сближение прямо пропорционален начальной дальности, при этом запас потребной характеристической скорости может быть оценен по формуле
mт = kl (8.9)
где mт - масса топлива;
l - начальная дальность сближения;
k - коэффициент, принимаемый равным 2 (м/с)/км для метода свободных траекторий и 5 (м/с)/км для метода параллельного наведения.
Помимо затрат топлива на спрямление траектории активного КА следует учитывать и его затраты на разгон и торможения вдоль линии визирования, причем разгон необходим в начале сближения, а «ступенчатое» торможение по мере сближения - из соображений безопасности.
Схема подсистемы автономного сближения КА представлена на рис. 8.10. Приборы измерения параметров относительного движения (обычно это какая-либо радиолокационная система) измеряют текущие значения расстояния между КА, компоненту их относительной скорости (вдоль линии визирования), угловые координаты станции и компоненты вектора угловой скорости линии визирования (они позволяют найти боковые составляющие относительной линейной скорости КА). Эта информация поступает в вычислительное устройство, в которое, кроме того, поступают данные о векторе собственной угловой скорости активного КА из блока датчиков угловых скоростей, информация об орбитальном движении КА (направление местной вертикали, положение плоскости орбиты и др.) от приборов ориентации. Все данные, поступающие в вычислительное устройство, выбираются так, чтобы решение задачи о потребном характере движения активного КА было бы обеспечено. Сигналы управления, выработанные в вычислительном устройстве, поступают на исполнительные органы-сближающий РД со своей подсистемой стабилизации и на РД причаливания и ориентации. В том случае, если реализуется относительно простой метод сближения по линии визирования, приборы ориентации могут отсутствовать, а вычислительное устройство может быть достаточно простым в отличие от БЦВМ для метода свободных траекторий.
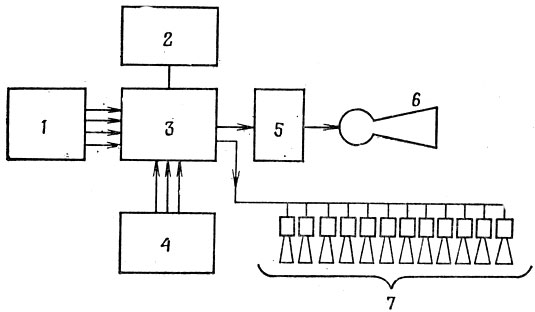
Рис. 8.10. Схема подсистемы автономного сближения КА: 1 - приборы измерения относительного взаимного движения сближающихся КА; 2 - блок датчиков угловых скоростей КА; 3 - вычисли, тельное устройство; 4 - приборы для определения орбитального движения КА; 5 - подсистема управления маршевым двигателем: 6 - маршевый двигатель; 7 - двигатели причаливания и ориентации
В заключение следует добавить, что возможно и комбинированное использование методов сближения, например, метода свободных траекторий для автономного сближения КА со значительных начальных расстояний и метода параллельного сближения на достаточно малых расстояниях между КА.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить активную ссылку на страницу источник:
http://12apr.su/ 'Библиотека по астрономии и космонавтике'